Markus Hofbauer
Markus Hofbauer
Home
Projects
Talks
Publications
Patents
Teaching
Light
Dark
Automatic
Paper-Conference
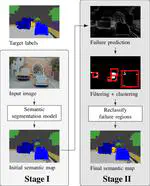
Pixel-Wise Failure Prediction for Semantic Video Segmentation
We propose a pixel-accurate failure prediction approach for semantic video segmentation. The proposed scheme improves previously …
Christopher Kuhn
,
Markus Hofbauer
,
Ziqin Xu
,
Goran Petrovic
,
Eckehard Steinbach
PDF
Cite
Dataset
Project
Poster
Slides
Video
DOI
Conference
Proceedings
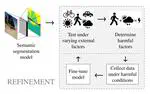
Situation-Aware Model Refinement for Semantic Image Segmentation
The quality of semantic image segmentation models can be affected by external factors such as weather or daytime. Those factors can …
Lukas Habermayr
,
Markus Hofbauer
,
Joao-Vitor Zacchi
,
Christopher Kuhn
PDF
Cite
Project
Slides
Video
DOI
Conference
Proceedings
Trajectory-Based Failure Prediction for Autonomous Driving
In autonomous driving, complex traffic scenarios can cause situations that require human supervision to resolve safely. Instead of only …
Christopher Kuhn
,
Markus Hofbauer
,
Goran Petrovic
,
Eckehard Steinbach
PDF
Cite
Project
Slides
Video
DOI
Conference
Proceedings
Adaptive Multi-View Live Video Streaming for Teledriving Using a Single Hardware Encoder
Teleoperated driving (TOD) is a possible solution to cope with failures of autonomous vehicles. In TOD, the human operator perceives …
Markus Hofbauer
,
Christopher Kuhn
,
Goran Petrovic
,
Eckehard Steinbach
PDF
Cite
Code
Project
Slides
DOI
Conference
Proceedings
Better Look Twice - Improving Visual Scene Perception Using a Two-Stage Approach
Accurate visual scene perception plays an important role in fields such as medical imaging or autonomous driving. Recent advances in …
Christopher Kuhn
,
Markus Hofbauer
,
Goran Petrovic
,
Eckehard Steinbach
PDF
Cite
Project
Slides
DOI
Conference
Proceedings
Award
Measuring Driver Situation Awareness Using Region-of-Interest Prediction and Eye Tracking
With increasing progress in autonomous driving, the human does not have to be in control of the vehicle for the entire drive. A human …
Markus Hofbauer
,
Christopher Kuhn
,
Lukas Püttner
,
Goran Petrovic
,
Eckehard Steinbach
PDF
Cite
Code
Project
Slides
DOI
Conference
Proceedings
Introspective Black Box Failure Prediction for Autonomous Driving
Failures in autonomous driving caused by complex traffic situations or model inaccuracies remain inevitable in the near future. While …
Christopher Kuhn
,
Markus Hofbauer
,
Goran Petrovic
,
Eckehard Steinbach
PDF
Cite
Project
Poster
Slides
Video
DOI
Conference
Proceedings
TELECARLA: An Open Source Extension of the CARLA Simulator for Teleoperated Driving Research Using Off-The-Shelf Components
Teledriving is a possible fallback mode to cope with failures of fully autonomous vehicles. One important requirement for teleoperated …
Markus Hofbauer
,
Christopher Kuhn
,
Goran Petrovic
,
Eckehard Steinbach
PDF
Cite
Code
Project
Poster
Slides
Video
DOI
Conference
Proceedings
Introspective Failure Prediction for Semantic Image Segmentation
Semantic segmentation of images enables pixel-wise scene understanding which in turn is a critical component for tasks such as …
Christopher Kuhn
,
Markus Hofbauer
,
Sungkyu Lee
,
Goran Petrovic
,
Eckehard Steinbach
PDF
Cite
Project
Slides
Video
DOI
Conference
Proceedings
Multi-View Region of Interest Prediction for Autonomous Driving Using Semi-Supervised Labeling
Visual environment perception is one of the key elements for autonomous and manual driving. Modern fully automated vehicles are …
Markus Hofbauer
,
Christopher Kuhn
,
Jiaming Meng
,
Goran Petrovic
,
Eckehard Steinbach
PDF
Cite
Code
Dataset
Project
Slides
Video
DOI
Conference
Proceedings
«
Cite
×