Adaptive Live Video Streaming for Teleoperated Driving
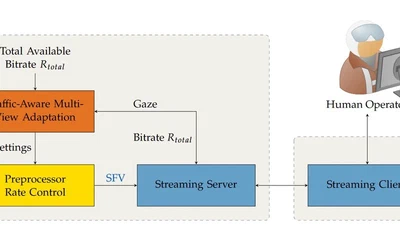
Failures of autonomous vehicles are inevitable. One possible solution to cope with these failures is teleoperated driving, where a human operator controls the vehicle from a remote …
 🌿
🌿(he/him)
Software Engineer - Developer Productivity & Associate Lecturer
Dr.-Ing. in Electrical and Computer Engineering
2019-01-01
2022-06-30
Technical University of Munich
M.Sc. in Electrical and Computer Engineering
2014-04-01
2016-04-30
Technical University of Munich
B.Sc. in Electrical and Computer Engineering
2011-05-01
2014-03-31
Technical University of Munich
I am passionate about software engineering and the creation of scalable code, which is maintainable over time. Currently, I am teaching these principles at TUM to undergraduate students by offering the Software Engineering Lab.
Before joining Zipline, I was working as a Staff Build Engineer and Tech Lead of the Build & Release Engineering team at Luminar Technologies since end of 2022. Our team enabled other developers to build and release high-quality software products by supporting a monorepo build system, developer tooling, CI/CD pipelines, and its infrastructure. As one of my core responsibilities, I was leading the migrating of our build system to Bazel.
I studied Electrical and Computer Engineering at the Technical University of Munich (TUM) for both Bachelor and Master. From 2016 to 2018, I was a Software Engineer at the Objective Software GmbH and Luxoft Inc and worked in cooperation with the BMW Group in the area of Automotive and Autonomous Driving. From 2019 to 2022, I worked at the Chair of Media Technology at TUM as a Research and Teaching Associate in the research group of Prof. Dr.-Ing. Eckehard Steinbach, where I received my Engineering Doctorate in 2022. My research at TUM was focused on video processing, compression, and transmission of multi-camera systems for autonomous and teleoperated driving. In 2022, I was a Senior Software Engineer at CareX.AI working on the software architecture and quality of our monorepository. My research at CareX.AI was focused on camera-based vital signs measurement.
Failures of autonomous vehicles are inevitable. One possible solution to cope with these failures is teleoperated driving, where a human operator controls the vehicle from a remote …
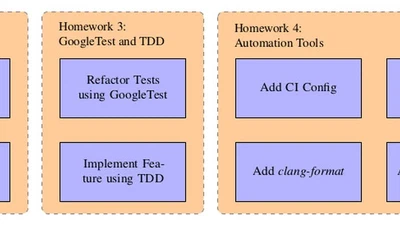
Programming and software engineering differ by the aspect of time and scale. Going beyond just implementing software that fulfills requirements, software engineering also means …
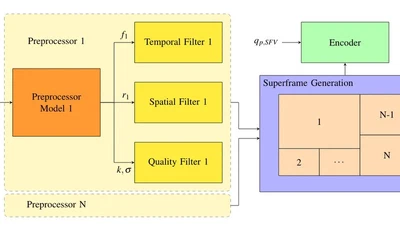
Currently, an increasing number of technical systems are equipped with multiple cameras. Limited by cost and size, they are often restricted to a single hardware encoder. The …
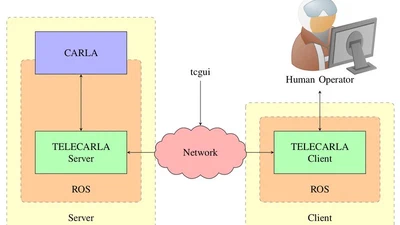
Teledriving is a possible fallback mode to cope with failures of fully autonomous vehicles. One important requirement for teleoperated vehicles is a reliable low delay data …
Talk at the Build Meetup Munich 2026 about how to maintain IDE support and developer tooling in monorepos using Bazel

Talk at MUC++ on how to maintain a developer environment with your build system

Talk at BazelCon 2025 summarizing the core problem of cargo splicing, exploring our recent solutions to decouple internal deps, and generating a stable Cargo.bazel.lock file to …

Talk at BazelCon 2025 reviewing existing solutions for IDE support and developer tooling in monorepos using Bazel.

Aspect Insights talk about how to improve Bazel flag defaults with the bazelrc-preset.bzl project.
Bachelor Course (BSEI) at the Department of Electrical and Computer Engineering, Technical University of Munich, Germany
TUM press release about our publication on introspective failure prediction for autonomous driving using late fusion of state and camera information