Introspective Black Box Failure Prediction for Autonomous Driving
Oct 20, 2020· ,,·
0 min read
,,·
0 min read
Christopher Kuhn
Markus Hofbauer
Goran Petrovic
Eckehard Steinbach
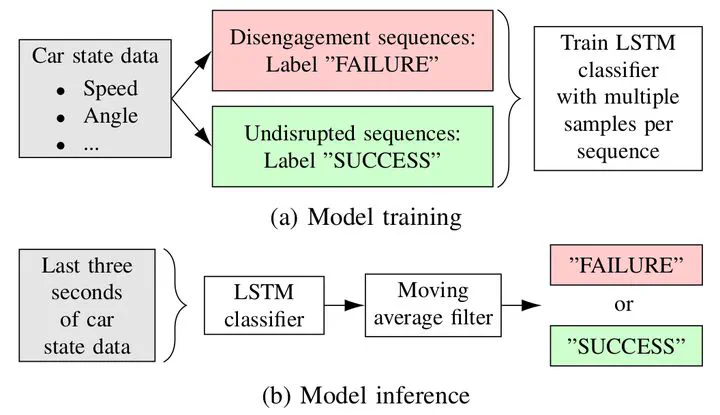 Image credit: IEEE
Image credit: IEEEAbstract
Failures in autonomous driving caused by complex traffic situations or model inaccuracies remain inevitable in the near future. While much research is focused on how to prevent such failures, comparatively little research has been done on predicting them. An early failure prediction would allow for more time to take actions to resolve challenging situations. In this work, we propose an introspective approach to predict future disengagements of the car by learning from previous disengagement sequences. Our method is designed to detect failures as early as possible by using sensor data from up to ten seconds before each disengagement. The car itself is treated as a black box, with only its state data and the number of detected objects being required. Since no model-specific knowledge is needed, our method is applicable to any self-driving system. Currently, no public data of real-life disengagements is available. To test our approach, we therefore use autonomous driving data provided by BMW that was collected with BMW research vehicles over three months. We show that an LSTM classifier trained with sequences of state data can predict failures up to seven seconds in advance with an accuracy of more than 80%. This is two seconds earlier than comparable approaches from the literature.
Type
Publication
In 31st IEEE Intelligent Vehicles Symposium