Measuring Driver Situation Awareness Using Region-of-Interest Prediction and Eye Tracking
Dec 2, 2020· ,,,,·
0 min read
,,,,·
0 min read
Markus Hofbauer
Christopher Kuhn
Lukas Püttner
Goran Petrovic
Eckehard Steinbach
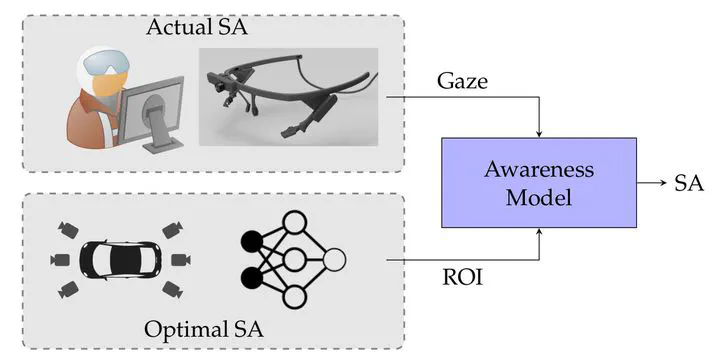 Image credit: IEEE
Image credit: IEEEAbstract
With increasing progress in autonomous driving, the human does not have to be in control of the vehicle for the entire drive. A human driver obtains the control of the vehicle in case of an autonomous system failure or when the vehicle encounters an unknown traffic situation it cannot handle on its own. A critical part of this transition to human control is to ensure a sufficient driver situation awareness. Currently, no direct method to explicitly estimate driver awareness exists. In this paper, we propose a novel system to explicitly measure the situation awareness of the driver. Our approach is inspired by methods used in aviation. However, in contrast to aviation, the situation awareness in driving is determined by the detection and understanding of dynamically changing and previously unknown situation elements. Our approach uses machine learning to define the best possible situation awareness. We also propose to measure the actual situation awareness of the driver using eye tracking. Comparing the actual awareness to the target awareness allows us to accurately assess the awareness the driver has of the current traffic situation. To test our approach, we conducted a user study. We measured the situation awareness score of our model for 8 unique traffic scenarios. The results experimentally validate the accuracy of the proposed driver awareness model.
Type
Publication
In 22nd IEEE International Symposium on Multimedia