TELECARLA: An Open Source Extension of the CARLA Simulator for Teleoperated Driving Research Using Off-The-Shelf Components
Oct 20, 2020· ,,,·
0 min read
,,,·
0 min read
Markus Hofbauer
Christopher Kuhn
Goran Petrovic
Eckehard Steinbach
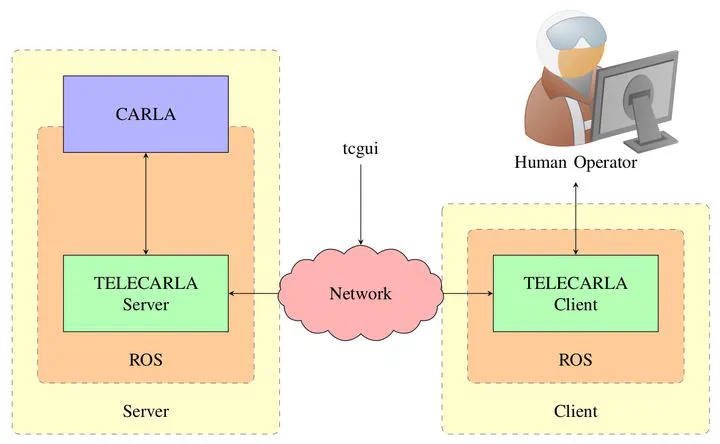 Image credit: IEEE
Image credit: IEEEAbstract
Teledriving is a possible fallback mode to cope with failures of fully autonomous vehicles. One important requirement for teleoperated vehicles is a reliable low delay data transmission solution, which adapts to the current network conditions to provide the operator with the best possible situation awareness. Currently, there is no easily accessible solution for the evaluation of such systems and algorithms in a fully controllable environment available. To this end we propose an open source framework for teleoperated driving research using low-cost off-the-shelf components. The proposed system is an extension of the open source simulator CARLA, which is responsible for rendering the driving environment and providing reproducible scenario evaluation. As a proof of concept, we evaluated our teledriving solution against CARLA in remote and local driving scenarios. The proposed teledriving system leads to almost identical performance measurements for local and remote driving. In contrast, remote driving using CARLA’s client server communication results in drastically reduced operator performance. Further, the framework provides an interface for the adaptation of the temporal resolution and target bitrate of the compressed video streams. The proposed framework reduces the required setup effort for teleoperated driving research in academia and industry.
Type
Publication
In 31st IEEE Intelligent Vehicles Symposium