Abstract
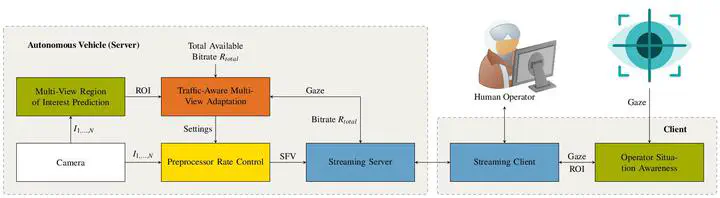
Failures of autonomous vehicles are inevitable. One possible solution to cope with these failures is teleoperated driving, where a human operator controls the vehicle from a remote environment. In this talk, we present adaptive video streaming for teleoperated driving, which provides the operator with the best possible situation awareness when controlling the vehicle from remote. For this, we designed a teledriving framework for the adaptation of individual camera views based on the current traffic situation. Additionally, we developed a preprocessing filter concept that allows for individual rate/quality adaptation while considering the hardware limitations of autonomous vehicles.
Markus Hofbauer
Senior Build Engineer & Associate Lecturer
Senior Build Engineer at Luminar Technologies and Associate Lecturer on Software Engineering at the Technical University of Munich.