Teleoperated Driving


Quantifying the Influence of Image Quality on Operator Reaction Times for Teleoperated Road Vehicles
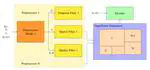
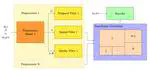
Teleoperated Driving (ToD) is a widely acknowledged concept applied to handle edge-case situations in automated vehicles. In ToD, a …