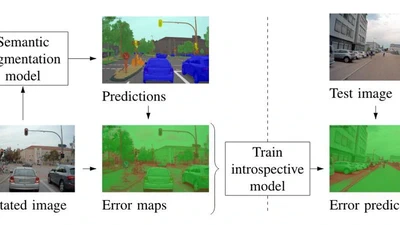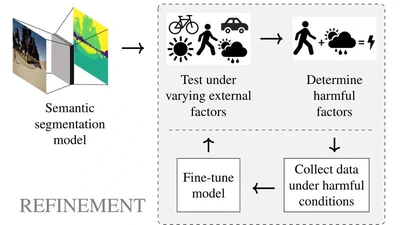
Situation-Aware Model Refinement for Semantic Image Segmentation
The quality of semantic image segmentation models can be affected by external factors such as weather or daytime. Those factors can lead to safety-critical mistakes. In this work, …
lukas-habermayr