Traffic-Aware Multi-View Video Stream Adaptation for Teleoperated Driving
Jun 19, 2022· ,,,,·
0 min read
,,,,·
0 min read
Markus Hofbauer
Christopher Kuhn
Mariem Khlifi
Goran Petrovic
Eckehard Steinbach
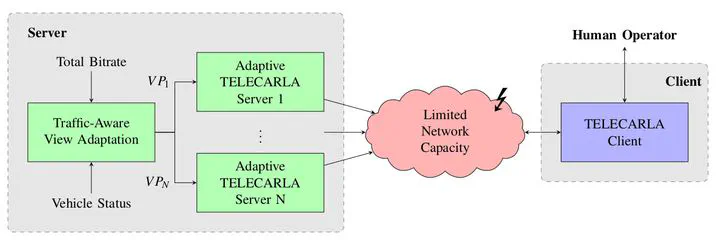 Image credit: IEEE
Image credit: IEEEAbstract
Remote control of an autonomous vehicle by a human operator requires low delay video transmission to resolve complex situations and ensure safety. The remote operator perceives the current traffic scenario via video streams from multiple cameras. To provide the operator with the best possible scene understanding while matching the available network resources, the video streams need to be automatically adapted. In this paper, we propose a traffic-aware multi-view video stream adaptation scheme. We estimate the importance of each camera view based on the vehicle’s real-time movement in traffic. The resulting prioritization together with the total available transmission rate determines a specific bit-budget for each camera view. We optimize the video quality of each individual video stream for the given bit-budget using a quality-of-experience-driven multi-dimensional adaptation scheme. Additionally, we apply a region-of-interest mask to the rear-facing camera views. The mask removes less important areas from the image which reduces the required bitrate. All modules are implemented to extend the existing TELECARLA framework. We evaluate the proposed traffic-aware adaptation scheme in a user study. We observe a high correlation between the proposed view prioritization module and the subjective ratings obtained in the user study. The region-of-interest masking achieves Bjontegaard Delta Rate savings of at least 19.8% compared to streaming the full camera view. The overall system improves the VMAF score by 1.86 per camera when considering the importance of the individual camera views as rated by the users. This demonstrates the potential of an individual adaptation for each camera view optimized for the current traffic situation.
Type
Publication
In 2022 IEEE 95th Vehicular Technology Conference