Adaptive Live Video Streaming for Teleoperated Driving
Apr 15, 2022· ·
0 min read
·
0 min read
Markus Hofbauer
Abstract
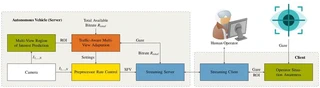
Failures of autonomous vehicles are inevitable. One possible solution to cope with these failures is teleoperated driving, where a human operator controls the vehicle from a remote environment. In this talk, we present adaptive video streaming for teleoperated driving, which provides the operator with the best possible situation awareness when controlling the vehicle from remote. For this, we designed a teledriving framework for the adaptation of individual camera views based on the current traffic situation. Additionally, we developed a preprocessing filter concept that allows for individual rate/quality adaptation while considering the hardware limitations of autonomous vehicles.
Date
Apr 15, 2022 14:00 — 15:00
Location
ScopeLab, Institute for Software Integrated Systems, Vanderbilt University
2201 West End Ave, Nashville, TN 37235

Authors
Markus Hofbauer
(he/him)
Software Engineer - Developer Productivity & Associate Lecturer
Markus is part of the Developer Productivity Engineering team at Zipline.
They develop and maintain the build system, developer tooling, and the CI/CD system to enable other developers to build and release high-quality software products.
Markus received his PhD in Electrical and Computer Engineering from the Technical University of Munich where he is still teaching principles of software engineering to students.