Doctoral Seminar - Adaptive Streaming of Sensor Information for Teleoperator Situation Awareness
Jul 3, 2020· ·
0 min read
·
0 min read
Markus Hofbauer
Abstract
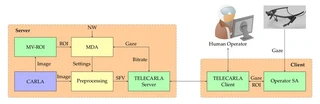
Teledriving is a possible fallback mode to cope with failures of fully autonomous vehicles. One important requirement for teleoperated vehicles is a reliable low delay data transmission solution, which adapts to the current network conditions to provide the operator with the best possible situation awareness.
Date
Jul 3, 2020 13:15 — 14:45
Location
Chair of Media Technology, Technical University of Munich
Arcisstr. 21, Munich, BY 80333

Authors
Markus Hofbauer
(he/him)
Software Engineer - Developer Productivity & Associate Lecturer
Markus is part of the Developer Productivity Engineering team at Zipline.
They develop and maintain the build system, developer tooling, and the CI/CD system to enable other developers to build and release high-quality software products.
Markus received his PhD in Electrical and Computer Engineering from the Technical University of Munich where he is still teaching principles of software engineering to students.